由于陀螺技术的军事敏感性,相关国家在高精度陀螺技术方面对我国实施技术封锁和产品禁运。151amjs澳金沙门—航天十六所惯性技术与智能测量工程研究中心经过多年技术攻关,研发了国内首台具有自主知识产权的GAT高精度磁悬浮陀螺全站仪,填补了我国在这一领域的空白。该仪器基于磁悬浮支撑以及无接触式光电力矩反馈技术实现自动寻北,为受限空间提供高精度的方位基准。近日,我院杨志强教授团队在该仪器的系统误差建模与补偿以及寻北数据动态环境评测等领域取得了重要进展。
依托GAT磁悬浮陀螺全站仪的连续模数信息转换和模拟仿真技术,杨志强教授团队的博士生王逸文等首次系统性研究了磁悬浮陀螺力矩器转子的周期误差特征,提出了一种基于连续小波变换和奇异谱分析的磁悬浮陀螺转子电流信号的自适应周期误差探测与分离模型(图1),提高了仪器的寻北精度,进一步揭示了陀螺转子运动的物理机制。
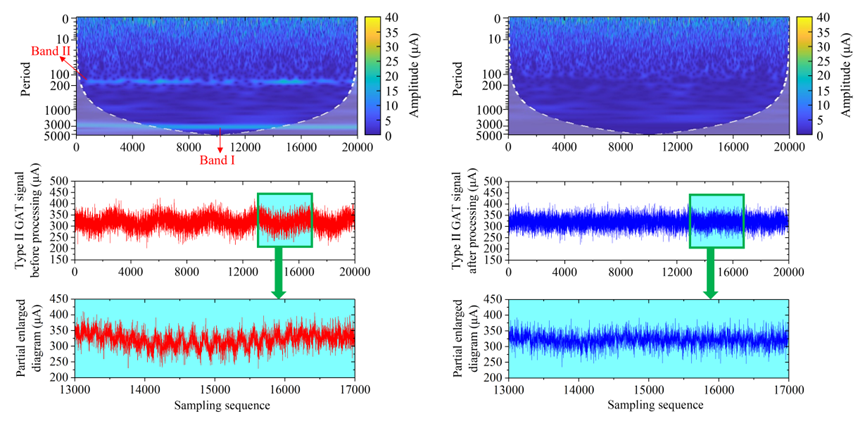
图1
为了解决磁悬浮陀螺全站仪在受到外部瞬时干扰力矩影响的环境下进行定向测量时信号的纠偏问题,博士生王逸文等提出了一种联合启发式分割算法以及双样本Kolmogorov-Smirnov检验的自动检测并剔除受“污染”的磁悬浮陀螺数据的模型(图2),进一步提升了仪器的鲁棒性以及环境适应能力,同时也为陀螺信号处理提供了一种新思路。
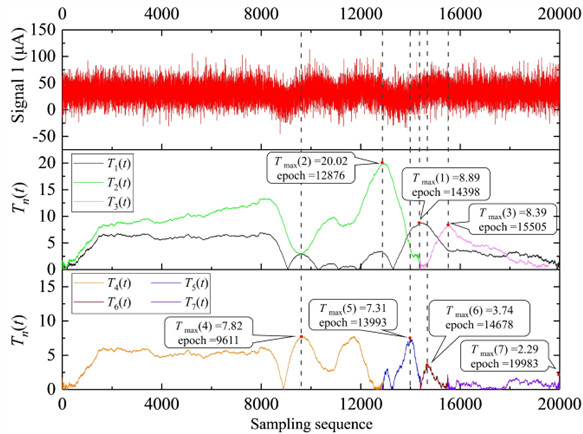
图2
这两项研究成果对磁悬浮陀螺基本理论的完善做出了重要贡献。杨志强教授团队将继续潜心攻关,后续将针对磁悬浮陀螺的风振扰动与复杂环境应用、磁悬浮陀螺温度漂移的建模与补偿等内容展开研究。
(供图供稿:王逸文 审核:苗行生)
